|
|
| MOQ: | 1 |
| Cena £: | 1500$ |
| standardowe opakowanie: | 169 cm (wys.), 75 cm (szer.), 30 cm (dł.) |
| Okres dostawy: | 1 miesiąc |
| Wydajność dostaw: | 99 jednostek |
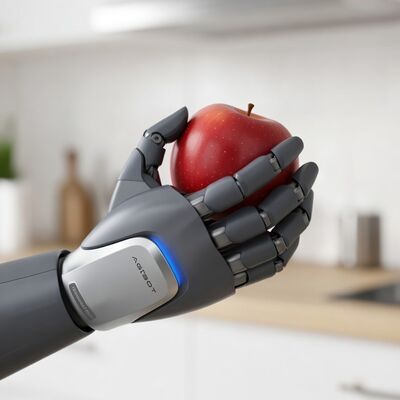
Nowa ręka robota humanoidalnego AGIBOT OmniHand Pro 2025 z pięcioma palcami to zaawansowany efektor końcowy robota, zaprojektowany tak, aby naśladować ruch ludzkiej dłoni z precyzją i elastycznością. Ta pięciopalczasta ręka robota obsługuje skoordynowany ruch palców, chwyt z dużą precyzją i inteligentne sprzężenie zwrotne siły dla złożonych zadań manipulacyjnych.
OmniHand Pro 2025 jest odpowiednia dla robotów humanoidalnych, robotów serwisowych, platform badawczych i ramion robotycznych w przemyśle, które wymagają naturalnego ruchu dłoni, adaptacyjnego obchodzenia się z przedmiotami i bezpiecznej interakcji człowiek-robot.
Każdy palec może poruszać się niezależnie, aby wykonywać naturalne chwytanie i manipulację, podobnie jak ruch ludzkiej dłoni.
Zintegrowane czujniki siły i dotyku umożliwiają adaptacyjne sterowanie chwytem w oparciu o kształt, wagę i kruchość obiektu.
Płynna i precyzyjna kontrola wielu połączeń obsługuje delikatne obchodzenie się z przedmiotami i złożone zadania manipulacyjne.
Zaawansowane algorytmy sterowania cyfrowego umożliwiają szybką reakcję na ruch i regulację w czasie rzeczywistym dla stabilnej pracy.
Obsługuje integrację z robotami humanoidalnymi, ramionami robotycznymi i robotami serwisowymi za pośrednictwem standardowych interfejsów komunikacyjnych i montażowych.
Elastyczne opcje konfiguracji pozwalają na dostosowanie do konkretnych zadań lub systemów robotycznych.
| Element | Specyfikacja |
|---|---|
| Typ produktu | Pięciopalczasta ręka robota humanoidalnego |
| Stopnie swobody | Wielopołączeniowe niezależne palce |
| Metoda sterowania | Inteligentne sterowanie cyfrowe |
| Wykrywanie | Sprzężenie zwrotne siły i dotyku |
| Kompatybilność | Roboty humanoidalne i ramiona robotyczne |
| Komunikacja | Standardowe interfejsy robotyczne |
| Integracja | Modułowy montaż i sterowanie |
| Zasilanie | Zasilanie z systemu zewnętrznego |
| Środowisko pracy | Pomieszczenia przemysłowe i badawcze |
Specyfikacje mogą się różnić w zależności od konfiguracji.
AGIBOT OmniHand Pro 2025 łączy w sobie ludzką konstrukcję mechaniczną z inteligentnym wykrywaniem i sterowaniem, aby wspierać nową generację robotów humanoidalnych i zaawansowanych platform robotycznych. Zapewnia wysoką wydajność manipulacji i zwiększoną elastyczność w przyszłych zastosowaniach.
Jest to pięciopalczasta ręka robota humanoidalnego, zaprojektowana do zaawansowanej manipulacji i ruchu zbliżonego do ludzkiego w robotyce.
Tak. Obsługuje integrację z robotami humanoidalnymi, ramionami robotycznymi i robotami serwisowymi za pomocą standardowych interfejsów.
Może wykonywać chwytanie, obsługę, manipulację obiektami i delikatne zadania, które wymagają precyzji i adaptacyjnego sterowania.
Tak. Zintegrowane czujniki siły i dotyku umożliwiają adaptacyjne sterowanie chwytem w oparciu o informację zwrotną z kontaktu.
Tak. Jest szeroko stosowany w laboratoriach badawczych nad sztuczną inteligencją i robotyką oraz w środowiskach dydaktycznych do zaawansowanych badań nad manipulacją.
Tak. Jego modułowa konstrukcja pozwala na dostosowanie do różnych zastosowań i wymagań systemowych.
|
|
| MOQ: | 1 |
| Cena £: | 1500$ |
| standardowe opakowanie: | 169 cm (wys.), 75 cm (szer.), 30 cm (dł.) |
| Okres dostawy: | 1 miesiąc |
| Wydajność dostaw: | 99 jednostek |
Nowa ręka robota humanoidalnego AGIBOT OmniHand Pro 2025 z pięcioma palcami to zaawansowany efektor końcowy robota, zaprojektowany tak, aby naśladować ruch ludzkiej dłoni z precyzją i elastycznością. Ta pięciopalczasta ręka robota obsługuje skoordynowany ruch palców, chwyt z dużą precyzją i inteligentne sprzężenie zwrotne siły dla złożonych zadań manipulacyjnych.
OmniHand Pro 2025 jest odpowiednia dla robotów humanoidalnych, robotów serwisowych, platform badawczych i ramion robotycznych w przemyśle, które wymagają naturalnego ruchu dłoni, adaptacyjnego obchodzenia się z przedmiotami i bezpiecznej interakcji człowiek-robot.
Każdy palec może poruszać się niezależnie, aby wykonywać naturalne chwytanie i manipulację, podobnie jak ruch ludzkiej dłoni.
Zintegrowane czujniki siły i dotyku umożliwiają adaptacyjne sterowanie chwytem w oparciu o kształt, wagę i kruchość obiektu.
Płynna i precyzyjna kontrola wielu połączeń obsługuje delikatne obchodzenie się z przedmiotami i złożone zadania manipulacyjne.
Zaawansowane algorytmy sterowania cyfrowego umożliwiają szybką reakcję na ruch i regulację w czasie rzeczywistym dla stabilnej pracy.
Obsługuje integrację z robotami humanoidalnymi, ramionami robotycznymi i robotami serwisowymi za pośrednictwem standardowych interfejsów komunikacyjnych i montażowych.
Elastyczne opcje konfiguracji pozwalają na dostosowanie do konkretnych zadań lub systemów robotycznych.
| Element | Specyfikacja |
|---|---|
| Typ produktu | Pięciopalczasta ręka robota humanoidalnego |
| Stopnie swobody | Wielopołączeniowe niezależne palce |
| Metoda sterowania | Inteligentne sterowanie cyfrowe |
| Wykrywanie | Sprzężenie zwrotne siły i dotyku |
| Kompatybilność | Roboty humanoidalne i ramiona robotyczne |
| Komunikacja | Standardowe interfejsy robotyczne |
| Integracja | Modułowy montaż i sterowanie |
| Zasilanie | Zasilanie z systemu zewnętrznego |
| Środowisko pracy | Pomieszczenia przemysłowe i badawcze |
Specyfikacje mogą się różnić w zależności od konfiguracji.
AGIBOT OmniHand Pro 2025 łączy w sobie ludzką konstrukcję mechaniczną z inteligentnym wykrywaniem i sterowaniem, aby wspierać nową generację robotów humanoidalnych i zaawansowanych platform robotycznych. Zapewnia wysoką wydajność manipulacji i zwiększoną elastyczność w przyszłych zastosowaniach.
Jest to pięciopalczasta ręka robota humanoidalnego, zaprojektowana do zaawansowanej manipulacji i ruchu zbliżonego do ludzkiego w robotyce.
Tak. Obsługuje integrację z robotami humanoidalnymi, ramionami robotycznymi i robotami serwisowymi za pomocą standardowych interfejsów.
Może wykonywać chwytanie, obsługę, manipulację obiektami i delikatne zadania, które wymagają precyzji i adaptacyjnego sterowania.
Tak. Zintegrowane czujniki siły i dotyku umożliwiają adaptacyjne sterowanie chwytem w oparciu o informację zwrotną z kontaktu.
Tak. Jest szeroko stosowany w laboratoriach badawczych nad sztuczną inteligencją i robotyką oraz w środowiskach dydaktycznych do zaawansowanych badań nad manipulacją.
Tak. Jego modułowa konstrukcja pozwala na dostosowanie do różnych zastosowań i wymagań systemowych.