|
|
| MOQ: | 1 |
| Cena £: | US $3500.00 - 4900.00/ Set |
| standardowe opakowanie: | Pudełko kartonowe/drewniana skrzynia |
| Okres dostawy: | 6 ~ 8 tygodni |
| Metoda płatności: | T/T |
| Wydajność dostaw: | 500 zestawów rocznie |
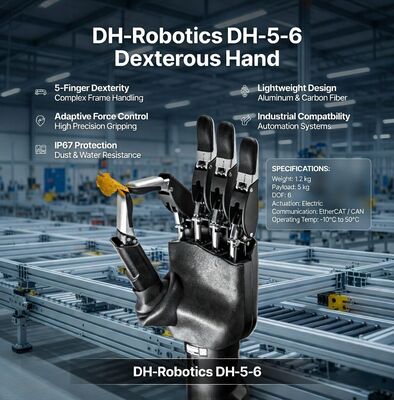
DH-Robotics DH-5-6 to zręczna dłoń robotyczna z 5 palcami napędzanymi cięgnami i 6 aktywnymi stopniami swobody. Jest przeznaczona do robotów humanoidalnych, robotów współpracujących i platform badawczych wymagających chwytania, kontroli siły i percepcji zbliżonej do ludzkiej. Dłoń wykorzystuje zintegrowane mikro-liniowe siłowniki i obsługuje hybrydową kontrolę pozycji-siły dla precyzyjnej i elastycznej manipulacji.
| Parametr | Specyfikacja |
|---|---|
| Palce | 5 palców (antropomorficzne) |
| Aktywne stopnie swobody | 6 |
| Całkowita liczba stawów | 12 |
| System napędowy | Napędzany cięgnami z mikro-liniowymi siłownikami |
| Czujniki | Czujniki siły / dotykowe |
| Tryb sterowania | Hybrydowe sterowanie pozycyjno-siłowe |
| Komunikacja | CAN / RS485 / EtherCAT |
| Waga | Około 400–550 g |
| Siła chwytu palca | 5–15 N na palec (typowa) |
Proszę podać:
|
|
| MOQ: | 1 |
| Cena £: | US $3500.00 - 4900.00/ Set |
| standardowe opakowanie: | Pudełko kartonowe/drewniana skrzynia |
| Okres dostawy: | 6 ~ 8 tygodni |
| Metoda płatności: | T/T |
| Wydajność dostaw: | 500 zestawów rocznie |
DH-Robotics DH-5-6 to zręczna dłoń robotyczna z 5 palcami napędzanymi cięgnami i 6 aktywnymi stopniami swobody. Jest przeznaczona do robotów humanoidalnych, robotów współpracujących i platform badawczych wymagających chwytania, kontroli siły i percepcji zbliżonej do ludzkiej. Dłoń wykorzystuje zintegrowane mikro-liniowe siłowniki i obsługuje hybrydową kontrolę pozycji-siły dla precyzyjnej i elastycznej manipulacji.
| Parametr | Specyfikacja |
|---|---|
| Palce | 5 palców (antropomorficzne) |
| Aktywne stopnie swobody | 6 |
| Całkowita liczba stawów | 12 |
| System napędowy | Napędzany cięgnami z mikro-liniowymi siłownikami |
| Czujniki | Czujniki siły / dotykowe |
| Tryb sterowania | Hybrydowe sterowanie pozycyjno-siłowe |
| Komunikacja | CAN / RS485 / EtherCAT |
| Waga | Około 400–550 g |
| Siła chwytu palca | 5–15 N na palec (typowa) |
Proszę podać: